


vmc1060 Fabrik Metall 3-Achsen-Vertikal-CNC-Fräsmaschinenzentrum
Vorteil
1. Der optionale CNC-Drehtisch kann eine vierachsige und fünfachsige Koordinatenverbindungsverarbeitung bilden.
2. Wahlweise freigestelltes automatisches Chipentfernungsgerät, mit der Bettstruktur, um die interne Sauberkeit sicherzustellen;optionale Spindelölkühlung etc.
3. Das Gussteil wird zwei Alterungsbehandlungen unterzogen, um Restspannungen im Material zu beseitigen.
4. X-, Y-, Z-Richtungsführungen können Taiwans Hochleistungs-Linearkugelführungen wählen, die sich durch hohe Geschwindigkeit, hohe Steifigkeit usw. auszeichnen.

Spezifikation
| Artikel | VMC1060 | ||||
| Größe des Arbeitstisches (Länge × Breite) mm | 1300×600 | ||||
| T-Nut (mm) | 5-18×100 | ||||
| Maximales Ladegewicht auf Arbeitstisch (KG) | 650 | ||||
| Verfahrweg der X-Achse (mm) | 1000 | ||||
| Verfahrweg der Y-Achse (mm) | 600 | ||||
| Verfahrweg der Z-Achse (mm) | 600 | ||||
| Abstand zwischen Spindelnase und Tisch (mm) | 100-700 | ||||
| Abstand zwischen Spindelmitte und Säule (mm) | 667 | ||||
| Spindelkonus | BT40/50 | ||||
| max.Spindeldrehzahl (U/min) | 8000/10000/12000 | ||||
| Spindelmotorleistung (Kw) | 15.11 | ||||
| Schnelle Vorschubgeschwindigkeit: X-, Y-, Z-Achse (m/min) | 16/16/16 (24/24//24 Linerführung) | ||||
| Schnelle Schnittgeschwindigkeit (m /min) | 10 | ||||
| Positionsgenauigkeit (mm) | ±0,005 | ||||
| Positionswiederholgenauigkeit (mm) | ±0,003 | ||||
| Typ des automatischen Werkzeugwechslers | Werkzeugwechsler mit 16 Werkzeugköpfen (optionaler automatischer Werkzeugwechsler mit 24 Armen) | ||||
| max.Werkzeuglänge (mm) | 300 | ||||
| max.Werkzeugdurchmesser | Φ80 (benachbartes Werkzeug)/φ150 (nicht benachbartes Werkzeug) | ||||
| Max.tool-Gewicht (KG) | 8 | ||||
| Werkzeugwechselzeit (Tool-to-Tool)Sek | 7 | ||||
| Luftdruck (Mpa) | 0,6 | ||||
| Maschinengewicht (KG) | 7500 | ||||
| Gesamtgröße (mm) | 3340*2800*2700 | ||||
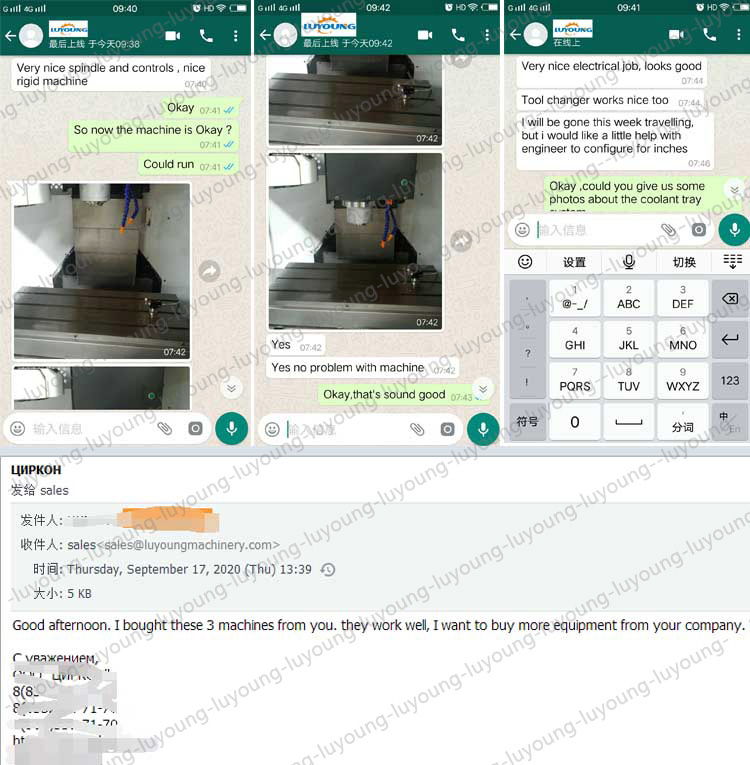
Warum uns wählen
Wir erhalten viele gute Rückmeldungen von Kunden, zum Beispiel:
Sehr schöne Spindel und Steuerung, schöne starre Maschine.Sehr gute Elektrik, sieht gut aus.
Werkzeugwechsler funktioniert auch gut.
Ich habe 3 Maschinen bei Ihnen gekauft.Sie funktionieren gut, ich möchte mehr Geräte von Ihrer Firma kaufen.
Maschinenprüfung
1. Die Erkennung der Linearbewegungs-Positionierungsgenauigkeit sollte unter lastfreien Bedingungen durchgeführt werden, und die Lasermessung muss vorherrschen.
2. Erkennung der wiederholten Positionierungsgenauigkeit einer linearen Bewegung. Das zur Erkennung verwendete Instrument ist das gleiche wie das zur Erkennung der Positionierungsgenauigkeit verwendete.
3. Erkennung der Rückkehrgenauigkeit des Ursprungs der linearen Bewegung.
4. Die Umkehrfehlererfassung einer Linearbewegung wird mehrere Male (im Allgemeinen 7 Mal) an drei Positionen nahe dem Mittelpunkt und beiden Enden des Hubs gemessen, und der Durchschnittswert jeder Position wird berechnet, und der Maximalwert des erhaltenen Durchschnittswerts ist der inverse Fehlerwert.

Produktkategorien
-

BC6085 Fabrikpreis formende Werkzeugmaschine mit ...
-

TCK25 kleine automatische hochwertige Bandenart sl ...
-

C6140/C6240 Spaltbett-Metalldrehmaschine
-

VMC650 Hochgeschwindigkeits-3-Achsen-vertikale Metall-CNC-Fräse ...
-

H50 Metalldreh-CNC-Combo-Drehmaschine Fräsmaschine ...
-

BC6050 hochwertige Metallformmaschine





